

- Kategória
RC Video Magazín (12)
RC vybavenie (48)
Stavba (61)
Lietadlá (28)
Vrtuľníky (8)
Autá a lode (13)
Ostatné (64)
Prerábka čínskej koptéry na DSM2
Pridané: 27. 6. 2016 o 21:30 | ID článku: CLA347 | Zobrazenia: 5288x | Komentárov: 3 | Autor: Dzino
Tento návod som napísal pre inšpiráciu - ako sa dá čínska no-name koptéra predobiť na super polietávatko do bytu ovládané cez poriadny vysielač. Čínske mini koptéry sa dajú kúpiť za 15-20EUR, len ovládač čo k tomu dávajú je dosť zúfalý a ťažko sa ovláda s ním. Navyše kvalita elektroniky je dosť slabá a po čase sa pokazí. Riešenie je prerobiť koptérku na DSM2 - aby sa dala ovládať cez "poriadny" ovládač. Tento článok obsahuje kompletný návod ako prerobiť čínsku koptéru na DSM2 protokol (Spektrum).
1. Čo potrebujete
- Samozrejme brushed koptérku, ktorú chcete prerobiť. Ja som prerábal Eachine CG-023.
(prípadne tento návod môžete použiť aj na stavbu novej brushed kopterky. Na Bangoods/Aliexpress sa dajú kúpiť pekné rámy (Napríklad: http://www.banggood.com/90mm-Carbon-Fiber-DIY-Micro-Mini-FPV-Quadcopter-Frame-Kit-2mm-Support-8_5x20mm-Coreless-Motor-p-1055212.html), a aj motorčeky (http://www.banggood.com/Chaoli-CL-820-8_5x20mm-Coreless-Motor-for-90mm-150mm-DIY-Micro-FPV-RC-Quadcopter-Frame-p-1054803.html))

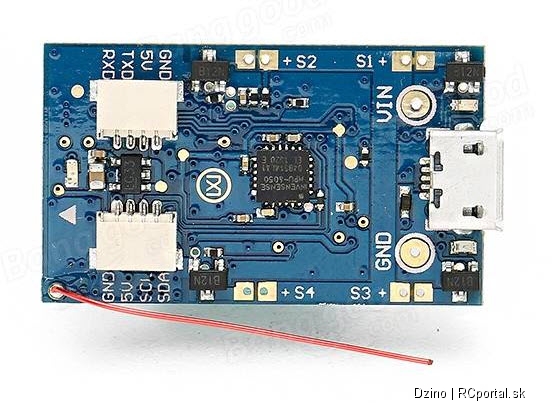
- Riadiaca doska zo zabudovaným DSM2 prijímačom a Brushed ESC
Ja som kupoval tu: http://www.banggood.com/Micro-Scisky-32bits-Brushed-Flight-Control-Board-Based-On-Naze-32-For-Quadcopters-p-1002341.html
Ale dá sa kúpiť aj v HobbyKingu: http://www.hobbyking.com/hobbyking/store/__86503__Quanum_Pico_32bit_Brushed_Flight_Control_Board.html
alebo http://www.overskyrc.com/micro-scisky-32-bits-brushed-flight-control-board-p-661.html

- DSM2 vysielač, alebo OrangeRX modul (napríklad do Taranisu)

2. Flashnutie CleanFlight do riadiacej dosky
Prvý krok (ešte pred vložením riadiacej dosky do koptéry) je napálenie aplikácie CleanFlight. Riadiaca jednotka by fungovala aj s BetaFlight, ale pre túto koptéru preferujem CleanFlight - ten je predsalen lepšie otestovaný.
Riadiacu dosku napojíme cez USB do PC a spustíme CleanFlight Configurátor (V prehliadači Chrome, treba stiahnúť CleanFlight Configurator cez WebStore).
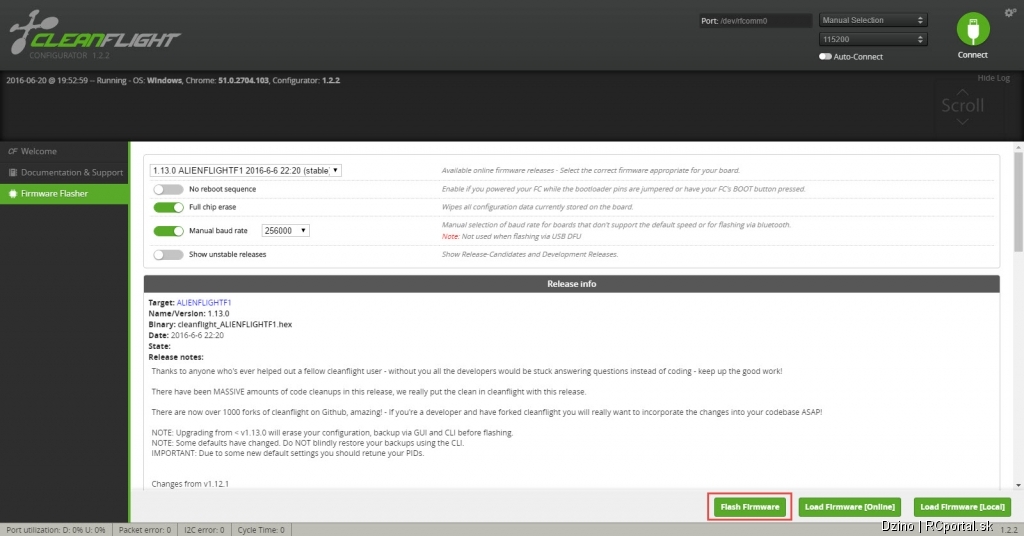
Kliknineme na záložku "Firmware Flasher". V zozname vyberieme dosku ALIENFLIGHTF1 (poslednú verziu) a klikneme Load Firmware [Online]. Po načítaní firmware sa aktivuje tlačítko "Flash Firmware". Doska sa flashne kliknutím na toto tlačítko.

3. Párovanie s vysielačom
Párovanie je možné aj keď doska je napájaná iba cez USB. Doska do párovacieho režimu porejde automaticky po 10 sekundách po zapnutí - indikovať to bude červená LED v prednej časti dosky, ktorá zvýši frekvenicu blikania. Vo vysielači vytvoríme nový Multirotor model a dáme párovanie (Bind). Pri párovaní treba mať vysielač blízko pri doske (v návode píšu 5cm). Po úspešnom párovaní sa červená LED rozvieti trvalo.
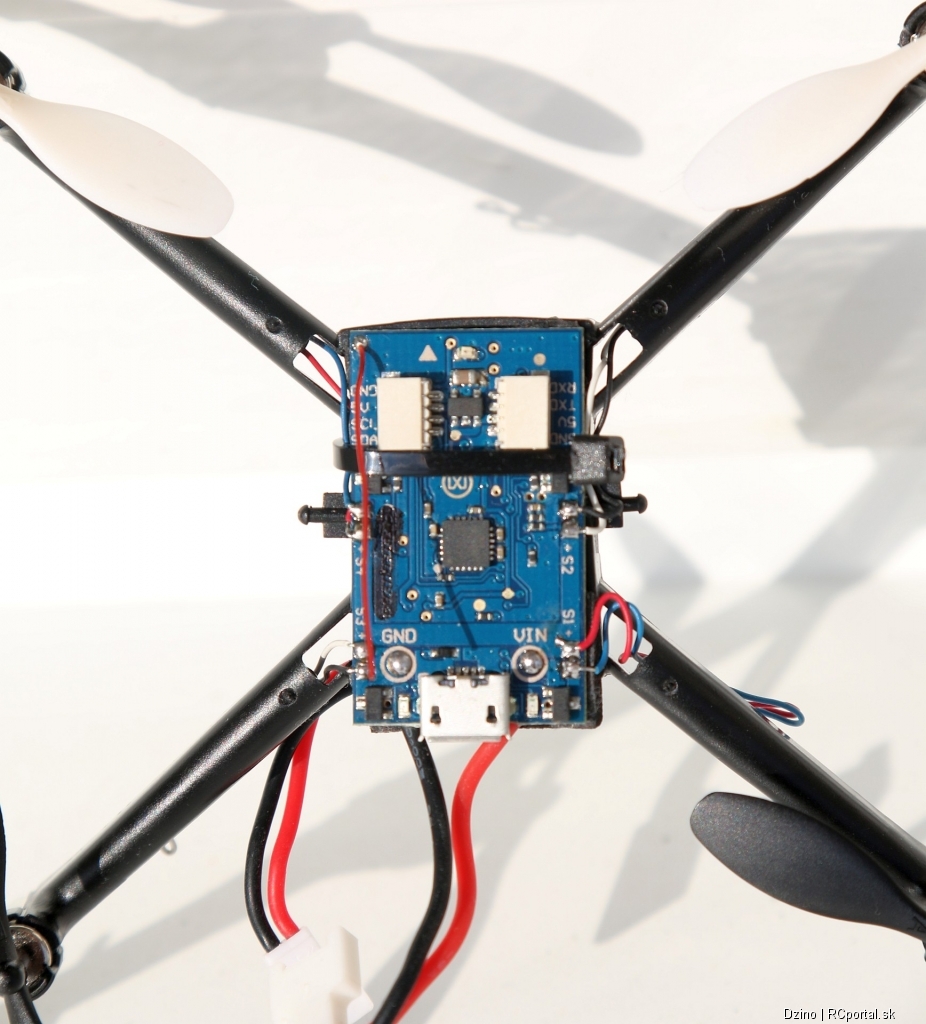
4. Mechanické zostavenie koptéry
Nakoľko riadiaca jednotka obsahuje všetko v sebe, tak mechanické zostavenie je jednoduché: Naspájkovať kábliky na pripojenie batérky a 4 motory.
Motory sa montujú nasledovne:
Vľavo hore: CW motor - má červenomodré kábliky. Červený káblik sa pripája na plus, modrý na mínus.
Vpravo hore: CCW motor - má bieločierne kábliky. Biely káblik sa pripája na plus, čierny na mínus.
Vľavo dole: CCW motor - má bieločierne kábliky. Biely káblik sa pripája na plus, čierny na mínus.
Vpravo dole: CW motor - má červenomodré kábliky. Červený káblik sa pripája na plus, modrý na mínus.
Nasadíme vrtulky:
Vrtulka označená A - na CW motor
Vrtulka označená B - na CCW motor

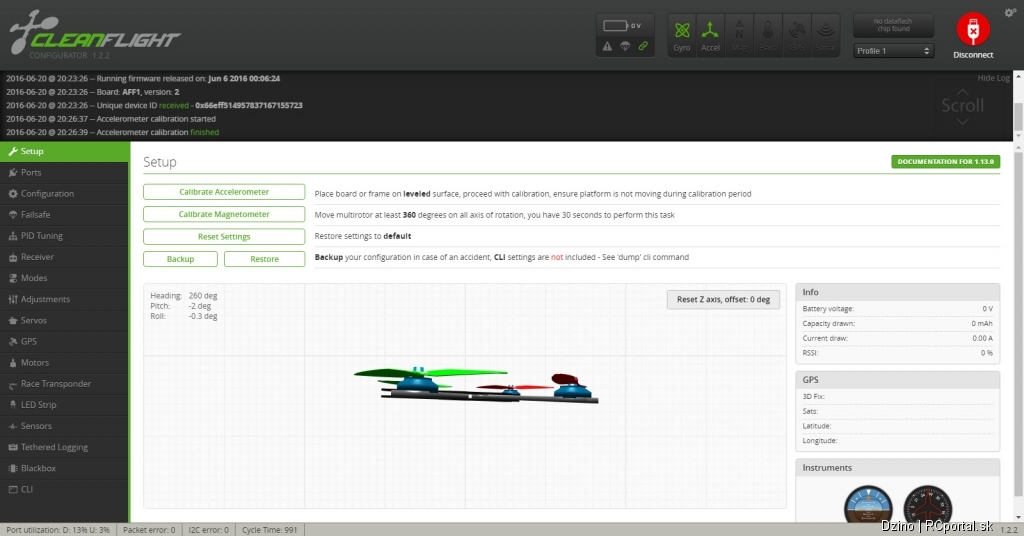
5. CleanFlight - Záložka "Setup"
Riadiacu jednotku napojíme cez USB, zapneme CleanFlight Configurátor, klineme na záložku "Setup".
Najprv je potrebné nakalibrovať akcelerometer. Koptéru položíme na rovný povrch a klikneme na "Calibrate Accelormeter". počas kalibrácie koptéra musí byť bez pohybu.

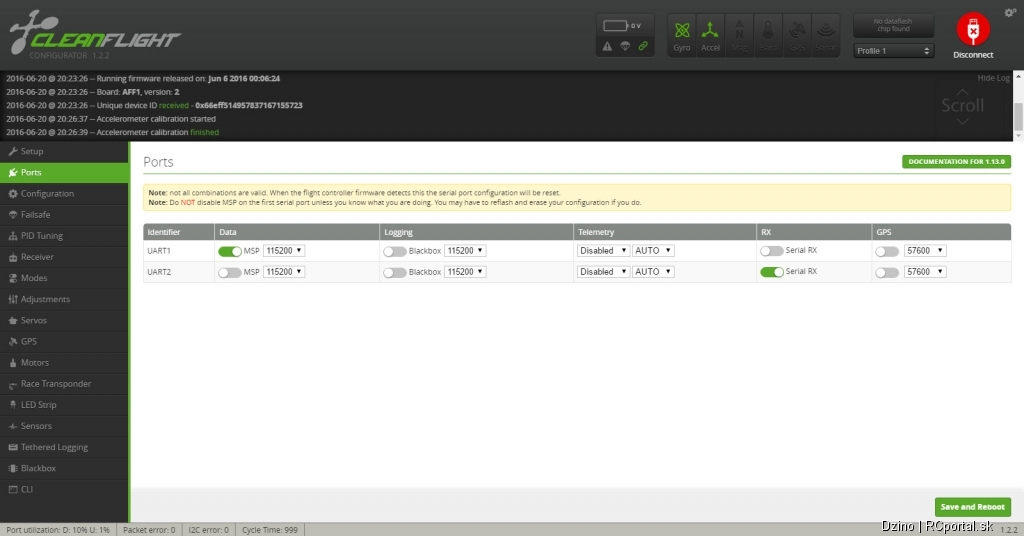
6. CleanFlight - Záložka "Ports"
UART1 nastaviť na MSP (cez ten port riadiaca jednotka komunikuje s PC)
UART2 nastaviť na SerialRX (cez SerialRX je napojený DSM2 prijímač)

Ak ste pre použili ALIENFLIGHTF1 firwmare, tak tieto hodnoty budú prednastavené. Kliknite na "Save" aby sa údaje uložili (V CleanFlight musíte v každej záložke klinúť na uložiť. Ak sa preklinete na inú záložku bez uloženia, tak o zmeny sa stratia)
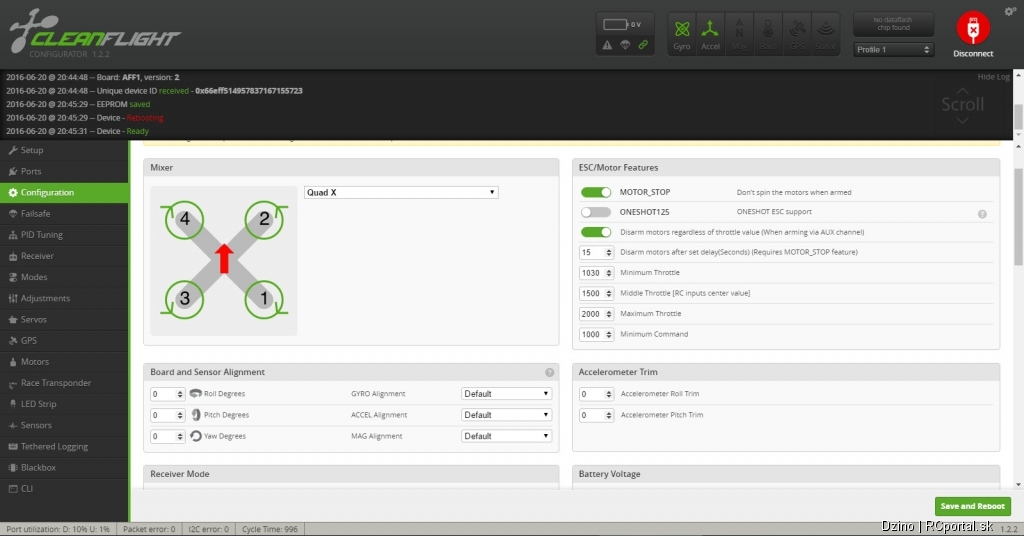
7. CleanFlight - Záložka "Configuration"
V záložke "Configuration" je potrebné nastaviť:
MOTOR_STOP - zapnúť - Toto nastavenie zabezpečí aby sa motory neroztočili po odblokovaní motorov
Disarm motors after set delay - odporúčam o niečo zväčšiť - je to interval za ktorý sa morory automaticky zablokujú ak nevzlietneme
Minimum Trottle - hodnota pri ktorom sa motory bezpečne točia bez zasekávania. Pri jednosmerných motoroch je to relatívne nízke číslo, tie sa vedia bez problémov rozbehnúť.
Minimum/Middle/Maximum - necháme tak. Iba ak sa pri 1000 motory točili, tak Minimum treba znížiť

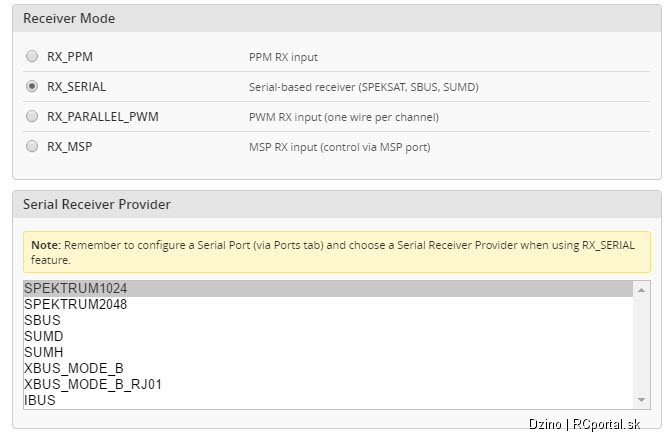
Serial Recevier Protocol - nastaviť na SPEKTRUM1024 - toto je dôležité, inak nebudú kanály nebudú sedieť

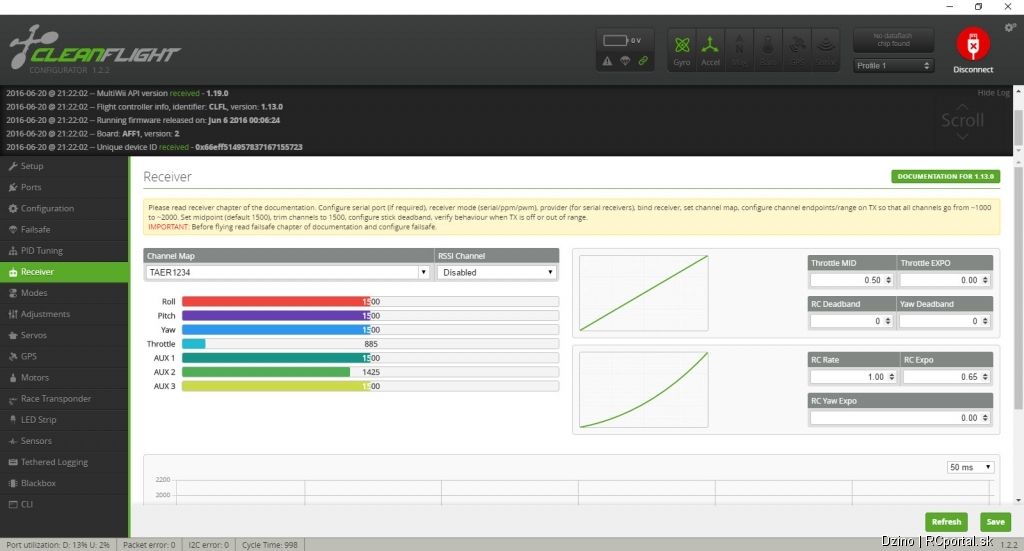
8. CleanFlight - Záložka "Reciver"
V tejto záložke sa nastavuje vysielač.

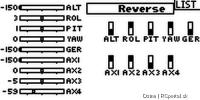
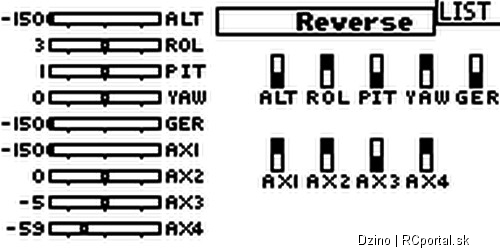
Reverzy
Naprv skontrolujeme smery páčok - ak smer páčky nekorešponduje s pohybom status baru v CleanFlight, tak treba zapnúť reverz:
Páčka krídelka: Ak sa posunie do prava, tak hodnota ROLL musí stúpať (ak klesá treba zapnúť reverz)
Páčka výškovky: Ak sa posunie do predu, tak hodnota PITCH musí stúpať
Páčka smerovky: Ak sa posunie do prava, tak hodnota YAW musí stúpať
Páčka plynu: Ak sa posunie do hore, tak hodnota TROTTLE musí stúpať
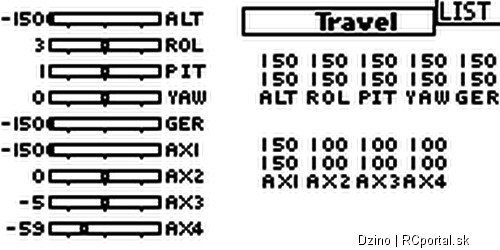
Koncové body
Koncové body je potrebné nastaviť tak, aby pri dolnej polohe bola hodnota zobrazovaná v CleanFlight bezpečne pod 1000 a v hornej polohe bezpečne nad 2000.
Ak to nie je, tak na vysielači je potrebné nastaviť Travel Limit:

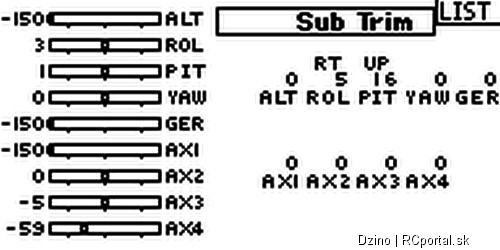
Stredový bod
Ak je páčka v strede, tak CleanFlighte by hodnota mala byť 1500. Ak je stredová hodnota mimo 1500, tak to koptéra berie ako príkaz na let daným smerom a bude driftovať.
Stredové body sa nastavia cez Sub Trim:

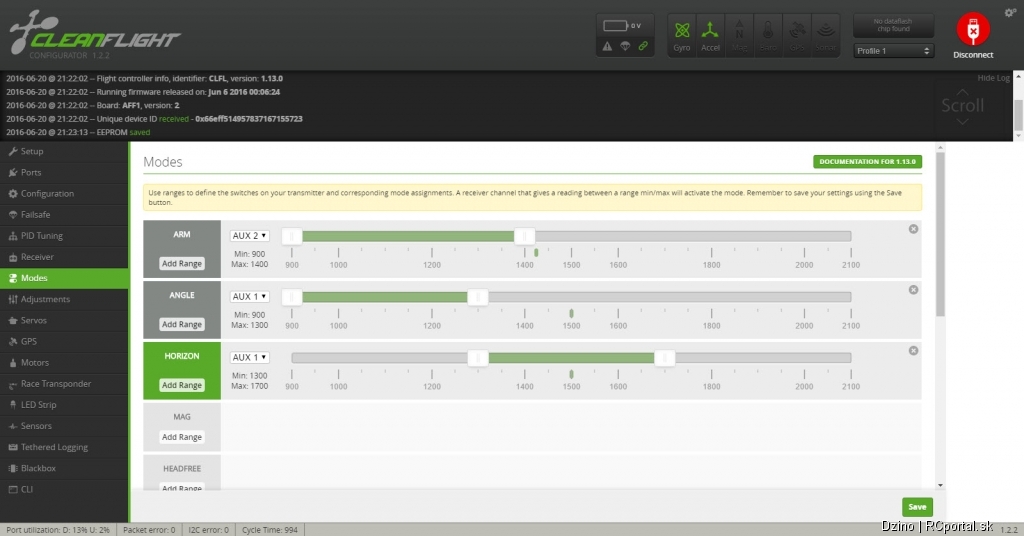
9. CleanFlight - Záložka "Modes"
V tejto záložka sa nastavujú letové módy. Na vysielači priradíme 3 polohový prepínač na kanál 5 (AUX1) a pre jednotlivé poholy nastavíme módy:
Poloha 1: ANGLE MODE - plne stabilizovaný mód. Keď posuniete páčku výškovky dopredu, tak v tomto móde sa koptéra začne nakláňať dopredu, ale iba do maximálneho povoleného uhlu (50°) po pustení páčky sa koptére automaticky vráti do vodovnej poholy.
Poloha 2: HORIZONT MODE - niečo medi stabilizovaným a akro modom. Ak je páčka okolo stredu, tak sa koptére správa ako v stabilizovanom móde a ak sa páčka posunie na okrajovú polohu, tak sa koptéra správa ako v akrobatickom móde a umožní spraviť flip (otočku)
Poloha 3: RATE MODE - Akrobatický mód
Kanál 6 (AUX2) na vysielači nastavíme na 2 polohový prepínač kde štandardne je Trottle Hold. Tento kanál priradíme na funkciu - ARM - Zamknutie/Odomknutie motorov. Keď sú motory odomknuté, tak na zadnej strane dosky svieti zelená LED. Namiesto šaškovania z páčkou smerovky sa koptérka bude odomykať cez prepínač.

10. CleanFlight - Záložka "PID Tuning"
Správne nastavenie PID je alchýmia. Nastavenie PID výrazne ovplyvňuje letové vlastnosti koptéry. Predtým než sa pokúsim vysvetliť ako to nastaviť, ešte upozorním čo nerobiť: Nikdy bezhlavo nekopírujte nastavenia PID z netu - nastavenie PID závisí od použitých komponentov, PID kontorléra a verzie CleanFlight. Teraz je koniec júna 2016 a aktuálne je CleanFlight verzia 1.13. O mesiac, dva bude ďaľšia verzia a rovnaké hodnoty PID nemusia znamenať presne to isté ako vo verzii 1.13. Takže aj keď budete mať rovnaké komponenty, tak neodpisovať PID z netu...
Čo je PID? - PID je nastavenie riadiacej jednotky ako má vyrovnávať koptéru.
Čo znamenajú jednotlivé písmená PID?
P - Proportional - tento parameter hovorí ako rýchlo sa koptéra snaží natočiť do požadovanej pozície. Poviete si, že čo najrýchlejšie - len keď parameter nastavíte príliš vysoko, tak to kontorlér prepískne a prebehne požadovanú pozíciu a vzniknú oscilácie.
Príliš nízke P: Koptéra pomaly reaguje na pohyby páčkou, celkovo let je vláčny
Príliš vyskoké P: Koptéra osciluje. Oscilácie od vysokého P sú väčšej frekvencii a s pravidelnou amplitúdou (na rozdiel od oscilácii nízkeho D kde frekvencia nižšia a oscilácie nepravidelné)
I - Integral - Tento parameter udáva veľkosť reakcie na malé výchylky - napríklad vietor alebo iné vplyvy - parameter ovplyvňuje stabilitu letu, vyšší parameter I znamená pevnejšie držanie koptéry za letu. Príliš vysoké I zase spôsobuje oscilácie (nižšie než pri vysokom P)
D - Derivative - To je parameter utlmuje rýchlosť akou sa koptéra snaží dostať na požadovanú pozíciu. Pokiaľ by koptéra nemala hmotnosť, tak parameter D by nebol potrebný, ale keďže má, tak pri pohybe naberá zotrvačnosť. Ak je ďaleko od požadovanej polohy, tak tlmí málo a ako sa blíži ku požadovanej polohe, tak tlemenie sa zväčší aby koptéra zastala v požadovanej polohe.
Príliš nízke D: Pri nízkom D nastávajú oscilácie. Oscilácie od nízkeho D nemajú rovnakú frekvenciu. Prejavuje sa to hlavne pri ostrom otočení. Po otočení sa koptéra rozkýva a oscilácie narastajú.
Príliš vysoké D: Koptéra má pomalšie vyrovnáva let.
Postup nastavenia PID
1. Koptéra by mala byť v ANGLE MODE. Cez prepínač odomkneme koptéru - zelená LED musí svietiť. Ak po prepnutí prepínača sa nerozvieti zelená LED, treba skontorlovať či páčka plynu či je na nule.
2. Ako prvý sa nastavuje parameter P. S koptérou opatrne vzlietneme. Udržujeme ju iba stabilnom vise s minimálnymi zásahmi z ovládača. Motorčeky nesmú oscilovať. Ak pri prvom lete budú, tak s parametrom P treba ísť dolu, ak neoscilujú, tak smerom hore. Parameter P posuvame po hodnote 1 a po každom vzlietnutí kontrolujeme či nezačnú oscilácie. Ak nájdeme hodnotu pri ktorej oscilújú, tak to je horný bod parametra P. Po nájdení tohto bodu znížime P naspať na bezpečnú hodnotu keď neoscilujú. To bude východiskové nastavenie pre ďaľšie doladenie.
3. Ako druhý sa nastavuje parameter I. Ako som písal tento parameter koriguje jemné výchylky. Testuje sa tak, že s koptérou sa vystúpa a páčku plynu prudko stiahneme cca na 1/4. Koptérka by mala klesať úplne rovno. Ak osciluje, tak I parameter je vysoký, ak neklesá rovno, tak je nízky. Parameter I pre začiatok meníme I po 0,01. V žiadnom prípade nesmie ísť nad 0,1 - to už je vysoko. Pre začiatok stačí nastaviť veľmi zhruba, lebo najväčší problém pri tejto koptérke bol parameter D.
4. Parameter D sa nastavuje ako posledný. Koptérou vzlietneme do visu (nesmú nastať žiadne oscilácie - ak je parameter P dobre nastavený), prejdeme do pomalého letu smerom dopredu (ak je parmeter I nastavný, tak koptéra letí rovno bez výchiliek a oscilácií) a spravíme ostrý obrat o 180°. Pri prvom lete sa ukážkovo prejaví nízke D. Koptéra sa rozkýva, zo začiaktu pomaly a potom sa zväčšujú až dotakej miery, že koptéra sa stane neovládateľná a koptérka padne. Pre začiatok navyšujeme D o hodnotu 5, pokiaľ oscilácie po obrate neprestanú. Netreba to prestreliť, lebo to potom sa zníži miera stabilizácie.
ROLL, PITCH, YAW RATE
Parameter Rate určuje rýchlosť pohybu koptéry pri posune páčkou ovládača. Napríklad posuniete smerovku a zdá sa vám, že koptéra sa pomaly otáča, tak treba pridať pameter YAW RARE. Posúvame zhruba po 0,1 pokial nie sme spokojný. Rovnako to platí pre ostatné smery. Ak napríklad sa nám zdá, že do bokov reaguje rýchlo, tak znížime ROLL RATE. Do tohto nastavenia vstupuje aj parameter EXPO v záložke Receiver. EXPO zmenšuje výchylky keď je páčka v strednej polohe. Pre každého je ideálne nastavenie iné. Ak chcete lietať flipy, tak RATE musí byť vysoké - pri nízkom RATE sa koptéra bude pomaly otáčať a nestihne dokončiť obrat počas pádu a pleskne na zem.
AUTOLEVEL STRENGHT
Tento parameter hovorí ako veľmi má riadica doska zasahovať do riadenia v ANGLE MODE. Ja som to navýšil aby koptéra lietala stabilnešie po byte. Ak chcete väčšiu kontrolu, tak treba znížiť tento parameter.
TPA, TPA Breakpoint
Len pre úplnosť vysvetlím čo to je. TPA hovorí o koľko sa má znížiť parameter P pri vysokom plyne. Pri nastavení parametra P sa môže stať, že pre visenie nastavíme ideálnu hodnotu P, lenže pri plnom plyne sa môže začať oscilovať. Parametrom TPA je možné nastaviť ako veľmi sa má P znížiť aby oscilácie nenastali. Pre mikro koptéru s jednosmernými motormi tento parameter nie je potrebné nastavovať, tak to ďalej nebudem rozpisovať.
Ak sme prešli prvý krát nastavením PID parametrov, tak koptéra by mala byť letuschopná. Pri ďalších letoch je potrebné jemne doladiť parametre (Parameter P meníme po 0.1, parameter I po 0.001, parameter D po 1). Odporúčam meniť iba jeden parameter naraz - aby bolo úplne jasné čo zmenilo správanie koptéry.
Záver
Dúfam, že návod bol zrozumiteľný - ak by niečo nebolo jasné tak napíšte do komentov a článok upravím.
Taktiež mi dajte vedieť či vo všeobecnosti takéto návody sú užitotočné pre vás - či má význam spísať ak sa zas odstanem k nejakej zaujímavej stavbe.
1. Čo potrebujete
- Samozrejme brushed koptérku, ktorú chcete prerobiť. Ja som prerábal Eachine CG-023.
(prípadne tento návod môžete použiť aj na stavbu novej brushed kopterky. Na Bangoods/Aliexpress sa dajú kúpiť pekné rámy (Napríklad: http://www.banggood.com/90mm-Carbon-Fiber-DIY-Micro-Mini-FPV-Quadcopter-Frame-Kit-2mm-Support-8_5x20mm-Coreless-Motor-p-1055212.html), a aj motorčeky (http://www.banggood.com/Chaoli-CL-820-8_5x20mm-Coreless-Motor-for-90mm-150mm-DIY-Micro-FPV-RC-Quadcopter-Frame-p-1054803.html))

- Riadiaca doska zo zabudovaným DSM2 prijímačom a Brushed ESC
Ja som kupoval tu: http://www.banggood.com/Micro-Scisky-32bits-Brushed-Flight-Control-Board-Based-On-Naze-32-For-Quadcopters-p-1002341.html
Ale dá sa kúpiť aj v HobbyKingu: http://www.hobbyking.com/hobbyking/store/__86503__Quanum_Pico_32bit_Brushed_Flight_Control_Board.html
alebo http://www.overskyrc.com/micro-scisky-32-bits-brushed-flight-control-board-p-661.html
- DSM2 vysielač, alebo OrangeRX modul (napríklad do Taranisu)

2. Flashnutie CleanFlight do riadiacej dosky
Prvý krok (ešte pred vložením riadiacej dosky do koptéry) je napálenie aplikácie CleanFlight. Riadiaca jednotka by fungovala aj s BetaFlight, ale pre túto koptéru preferujem CleanFlight - ten je predsalen lepšie otestovaný.
Riadiacu dosku napojíme cez USB do PC a spustíme CleanFlight Configurátor (V prehliadači Chrome, treba stiahnúť CleanFlight Configurator cez WebStore).
Kliknineme na záložku "Firmware Flasher". V zozname vyberieme dosku ALIENFLIGHTF1 (poslednú verziu) a klikneme Load Firmware [Online]. Po načítaní firmware sa aktivuje tlačítko "Flash Firmware". Doska sa flashne kliknutím na toto tlačítko.
3. Párovanie s vysielačom
Párovanie je možné aj keď doska je napájaná iba cez USB. Doska do párovacieho režimu porejde automaticky po 10 sekundách po zapnutí - indikovať to bude červená LED v prednej časti dosky, ktorá zvýši frekvenicu blikania. Vo vysielači vytvoríme nový Multirotor model a dáme párovanie (Bind). Pri párovaní treba mať vysielač blízko pri doske (v návode píšu 5cm). Po úspešnom párovaní sa červená LED rozvieti trvalo.
4. Mechanické zostavenie koptéry
Nakoľko riadiaca jednotka obsahuje všetko v sebe, tak mechanické zostavenie je jednoduché: Naspájkovať kábliky na pripojenie batérky a 4 motory.
Motory sa montujú nasledovne:
Vľavo hore: CW motor - má červenomodré kábliky. Červený káblik sa pripája na plus, modrý na mínus.
Vpravo hore: CCW motor - má bieločierne kábliky. Biely káblik sa pripája na plus, čierny na mínus.
Vľavo dole: CCW motor - má bieločierne kábliky. Biely káblik sa pripája na plus, čierny na mínus.
Vpravo dole: CW motor - má červenomodré kábliky. Červený káblik sa pripája na plus, modrý na mínus.
Nasadíme vrtulky:
Vrtulka označená A - na CW motor
Vrtulka označená B - na CCW motor
5. CleanFlight - Záložka "Setup"
Riadiacu jednotku napojíme cez USB, zapneme CleanFlight Configurátor, klineme na záložku "Setup".
Najprv je potrebné nakalibrovať akcelerometer. Koptéru položíme na rovný povrch a klikneme na "Calibrate Accelormeter". počas kalibrácie koptéra musí byť bez pohybu.
6. CleanFlight - Záložka "Ports"
UART1 nastaviť na MSP (cez ten port riadiaca jednotka komunikuje s PC)
UART2 nastaviť na SerialRX (cez SerialRX je napojený DSM2 prijímač)
Ak ste pre použili ALIENFLIGHTF1 firwmare, tak tieto hodnoty budú prednastavené. Kliknite na "Save" aby sa údaje uložili (V CleanFlight musíte v každej záložke klinúť na uložiť. Ak sa preklinete na inú záložku bez uloženia, tak o zmeny sa stratia)
7. CleanFlight - Záložka "Configuration"
V záložke "Configuration" je potrebné nastaviť:
MOTOR_STOP - zapnúť - Toto nastavenie zabezpečí aby sa motory neroztočili po odblokovaní motorov
Disarm motors after set delay - odporúčam o niečo zväčšiť - je to interval za ktorý sa morory automaticky zablokujú ak nevzlietneme
Minimum Trottle - hodnota pri ktorom sa motory bezpečne točia bez zasekávania. Pri jednosmerných motoroch je to relatívne nízke číslo, tie sa vedia bez problémov rozbehnúť.
Minimum/Middle/Maximum - necháme tak. Iba ak sa pri 1000 motory točili, tak Minimum treba znížiť
Serial Recevier Protocol - nastaviť na SPEKTRUM1024 - toto je dôležité, inak nebudú kanály nebudú sedieť
8. CleanFlight - Záložka "Reciver"
V tejto záložke sa nastavuje vysielač.
Reverzy
Naprv skontrolujeme smery páčok - ak smer páčky nekorešponduje s pohybom status baru v CleanFlight, tak treba zapnúť reverz:
Páčka krídelka: Ak sa posunie do prava, tak hodnota ROLL musí stúpať (ak klesá treba zapnúť reverz)
Páčka výškovky: Ak sa posunie do predu, tak hodnota PITCH musí stúpať
Páčka smerovky: Ak sa posunie do prava, tak hodnota YAW musí stúpať
Páčka plynu: Ak sa posunie do hore, tak hodnota TROTTLE musí stúpať
Koncové body
Koncové body je potrebné nastaviť tak, aby pri dolnej polohe bola hodnota zobrazovaná v CleanFlight bezpečne pod 1000 a v hornej polohe bezpečne nad 2000.
Ak to nie je, tak na vysielači je potrebné nastaviť Travel Limit:
Stredový bod
Ak je páčka v strede, tak CleanFlighte by hodnota mala byť 1500. Ak je stredová hodnota mimo 1500, tak to koptéra berie ako príkaz na let daným smerom a bude driftovať.
Stredové body sa nastavia cez Sub Trim:
9. CleanFlight - Záložka "Modes"
V tejto záložka sa nastavujú letové módy. Na vysielači priradíme 3 polohový prepínač na kanál 5 (AUX1) a pre jednotlivé poholy nastavíme módy:
Poloha 1: ANGLE MODE - plne stabilizovaný mód. Keď posuniete páčku výškovky dopredu, tak v tomto móde sa koptéra začne nakláňať dopredu, ale iba do maximálneho povoleného uhlu (50°) po pustení páčky sa koptére automaticky vráti do vodovnej poholy.
Poloha 2: HORIZONT MODE - niečo medi stabilizovaným a akro modom. Ak je páčka okolo stredu, tak sa koptére správa ako v stabilizovanom móde a ak sa páčka posunie na okrajovú polohu, tak sa koptéra správa ako v akrobatickom móde a umožní spraviť flip (otočku)
Poloha 3: RATE MODE - Akrobatický mód
Kanál 6 (AUX2) na vysielači nastavíme na 2 polohový prepínač kde štandardne je Trottle Hold. Tento kanál priradíme na funkciu - ARM - Zamknutie/Odomknutie motorov. Keď sú motory odomknuté, tak na zadnej strane dosky svieti zelená LED. Namiesto šaškovania z páčkou smerovky sa koptérka bude odomykať cez prepínač.
10. CleanFlight - Záložka "PID Tuning"
Správne nastavenie PID je alchýmia. Nastavenie PID výrazne ovplyvňuje letové vlastnosti koptéry. Predtým než sa pokúsim vysvetliť ako to nastaviť, ešte upozorním čo nerobiť: Nikdy bezhlavo nekopírujte nastavenia PID z netu - nastavenie PID závisí od použitých komponentov, PID kontorléra a verzie CleanFlight. Teraz je koniec júna 2016 a aktuálne je CleanFlight verzia 1.13. O mesiac, dva bude ďaľšia verzia a rovnaké hodnoty PID nemusia znamenať presne to isté ako vo verzii 1.13. Takže aj keď budete mať rovnaké komponenty, tak neodpisovať PID z netu...
Čo je PID? - PID je nastavenie riadiacej jednotky ako má vyrovnávať koptéru.
Čo znamenajú jednotlivé písmená PID?
P - Proportional - tento parameter hovorí ako rýchlo sa koptéra snaží natočiť do požadovanej pozície. Poviete si, že čo najrýchlejšie - len keď parameter nastavíte príliš vysoko, tak to kontorlér prepískne a prebehne požadovanú pozíciu a vzniknú oscilácie.
Príliš nízke P: Koptéra pomaly reaguje na pohyby páčkou, celkovo let je vláčny
Príliš vyskoké P: Koptéra osciluje. Oscilácie od vysokého P sú väčšej frekvencii a s pravidelnou amplitúdou (na rozdiel od oscilácii nízkeho D kde frekvencia nižšia a oscilácie nepravidelné)
I - Integral - Tento parameter udáva veľkosť reakcie na malé výchylky - napríklad vietor alebo iné vplyvy - parameter ovplyvňuje stabilitu letu, vyšší parameter I znamená pevnejšie držanie koptéry za letu. Príliš vysoké I zase spôsobuje oscilácie (nižšie než pri vysokom P)
D - Derivative - To je parameter utlmuje rýchlosť akou sa koptéra snaží dostať na požadovanú pozíciu. Pokiaľ by koptéra nemala hmotnosť, tak parameter D by nebol potrebný, ale keďže má, tak pri pohybe naberá zotrvačnosť. Ak je ďaleko od požadovanej polohy, tak tlmí málo a ako sa blíži ku požadovanej polohe, tak tlemenie sa zväčší aby koptéra zastala v požadovanej polohe.
Príliš nízke D: Pri nízkom D nastávajú oscilácie. Oscilácie od nízkeho D nemajú rovnakú frekvenciu. Prejavuje sa to hlavne pri ostrom otočení. Po otočení sa koptéra rozkýva a oscilácie narastajú.
Príliš vysoké D: Koptéra má pomalšie vyrovnáva let.
Postup nastavenia PID
1. Koptéra by mala byť v ANGLE MODE. Cez prepínač odomkneme koptéru - zelená LED musí svietiť. Ak po prepnutí prepínača sa nerozvieti zelená LED, treba skontorlovať či páčka plynu či je na nule.
2. Ako prvý sa nastavuje parameter P. S koptérou opatrne vzlietneme. Udržujeme ju iba stabilnom vise s minimálnymi zásahmi z ovládača. Motorčeky nesmú oscilovať. Ak pri prvom lete budú, tak s parametrom P treba ísť dolu, ak neoscilujú, tak smerom hore. Parameter P posuvame po hodnote 1 a po každom vzlietnutí kontrolujeme či nezačnú oscilácie. Ak nájdeme hodnotu pri ktorej oscilújú, tak to je horný bod parametra P. Po nájdení tohto bodu znížime P naspať na bezpečnú hodnotu keď neoscilujú. To bude východiskové nastavenie pre ďaľšie doladenie.
3. Ako druhý sa nastavuje parameter I. Ako som písal tento parameter koriguje jemné výchylky. Testuje sa tak, že s koptérou sa vystúpa a páčku plynu prudko stiahneme cca na 1/4. Koptérka by mala klesať úplne rovno. Ak osciluje, tak I parameter je vysoký, ak neklesá rovno, tak je nízky. Parameter I pre začiatok meníme I po 0,01. V žiadnom prípade nesmie ísť nad 0,1 - to už je vysoko. Pre začiatok stačí nastaviť veľmi zhruba, lebo najväčší problém pri tejto koptérke bol parameter D.
4. Parameter D sa nastavuje ako posledný. Koptérou vzlietneme do visu (nesmú nastať žiadne oscilácie - ak je parameter P dobre nastavený), prejdeme do pomalého letu smerom dopredu (ak je parmeter I nastavný, tak koptéra letí rovno bez výchiliek a oscilácií) a spravíme ostrý obrat o 180°. Pri prvom lete sa ukážkovo prejaví nízke D. Koptéra sa rozkýva, zo začiaktu pomaly a potom sa zväčšujú až dotakej miery, že koptéra sa stane neovládateľná a koptérka padne. Pre začiatok navyšujeme D o hodnotu 5, pokiaľ oscilácie po obrate neprestanú. Netreba to prestreliť, lebo to potom sa zníži miera stabilizácie.
ROLL, PITCH, YAW RATE
Parameter Rate určuje rýchlosť pohybu koptéry pri posune páčkou ovládača. Napríklad posuniete smerovku a zdá sa vám, že koptéra sa pomaly otáča, tak treba pridať pameter YAW RARE. Posúvame zhruba po 0,1 pokial nie sme spokojný. Rovnako to platí pre ostatné smery. Ak napríklad sa nám zdá, že do bokov reaguje rýchlo, tak znížime ROLL RATE. Do tohto nastavenia vstupuje aj parameter EXPO v záložke Receiver. EXPO zmenšuje výchylky keď je páčka v strednej polohe. Pre každého je ideálne nastavenie iné. Ak chcete lietať flipy, tak RATE musí byť vysoké - pri nízkom RATE sa koptéra bude pomaly otáčať a nestihne dokončiť obrat počas pádu a pleskne na zem.
AUTOLEVEL STRENGHT
Tento parameter hovorí ako veľmi má riadica doska zasahovať do riadenia v ANGLE MODE. Ja som to navýšil aby koptéra lietala stabilnešie po byte. Ak chcete väčšiu kontrolu, tak treba znížiť tento parameter.
TPA, TPA Breakpoint
Len pre úplnosť vysvetlím čo to je. TPA hovorí o koľko sa má znížiť parameter P pri vysokom plyne. Pri nastavení parametra P sa môže stať, že pre visenie nastavíme ideálnu hodnotu P, lenže pri plnom plyne sa môže začať oscilovať. Parametrom TPA je možné nastaviť ako veľmi sa má P znížiť aby oscilácie nenastali. Pre mikro koptéru s jednosmernými motormi tento parameter nie je potrebné nastavovať, tak to ďalej nebudem rozpisovať.
Ak sme prešli prvý krát nastavením PID parametrov, tak koptéra by mala byť letuschopná. Pri ďalších letoch je potrebné jemne doladiť parametre (Parameter P meníme po 0.1, parameter I po 0.001, parameter D po 1). Odporúčam meniť iba jeden parameter naraz - aby bolo úplne jasné čo zmenilo správanie koptéry.
Záver
Dúfam, že návod bol zrozumiteľný - ak by niečo nebolo jasné tak napíšte do komentov a článok upravím.
Taktiež mi dajte vedieť či vo všeobecnosti takéto návody sú užitotočné pre vás - či má význam spísať ak sa zas odstanem k nejakej zaujímavej stavbe.
Najnovšie články v kategórii Ostatné
Rapkátko na knipel plynuDeflectometer alias Výchylkometer
Pripojenie vysielačov učiteľ žiak
spínače
Odišla legenda
| Autor | Správa |
|
mifo modelár Príspevkov: 6 Moje modely Poslať správu |
Kolko stoji tato uprava? |
|
Dzino modelár 
Príspevkov: 352 Moje modely Poslať správu |
Ak koptéru máš v poriadku (všetky motory funkčné), tak stačí iba riadiaca doska za 28EUR. |
|
mifo modelár Príspevkov: 6 Moje modely Poslať správu |
dik Ok keby som robil novu kopteru tak riadiaca jednotka moze byt aj cc3d ? Na tie motory netreba regulator |

- Pridať komentár