


Technické parametre
| Výrobca: | Rozpätie: | 210 mm | Hmotnosť: | 344 g | |
| Kategória: | Koptéry | Dĺžka: | 0 mm | Materiál: | |
| Motor: |
Popis
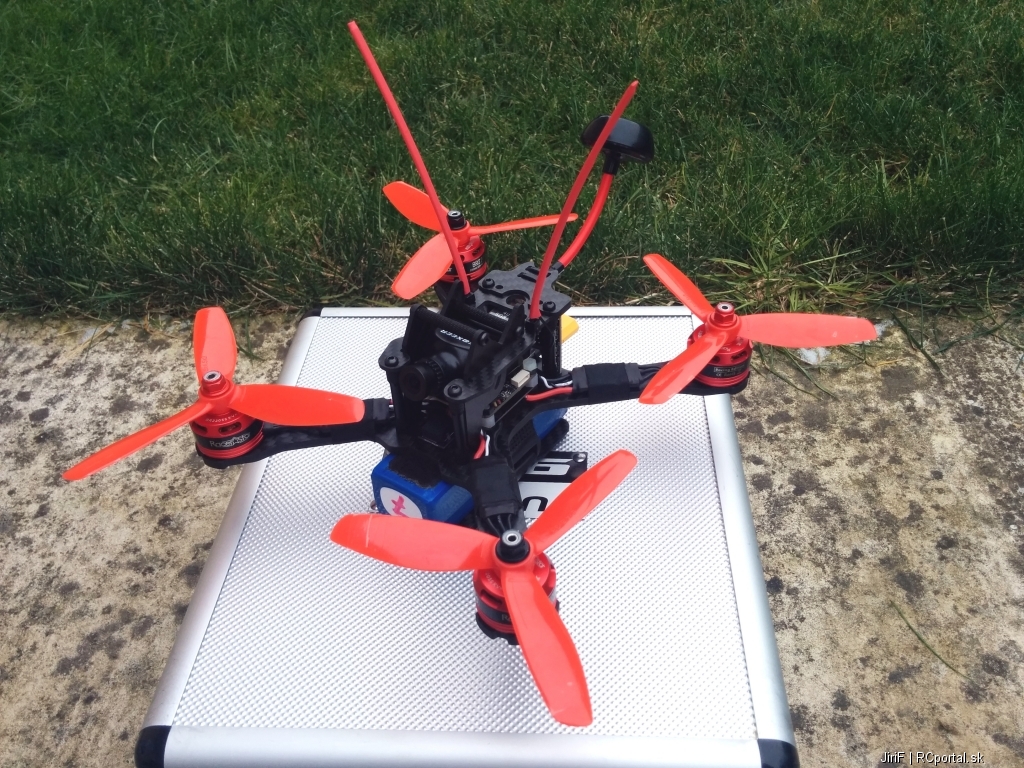
Ram Realacc X210 V+ 214mm 6K Carbon Fiber (Klon QAV-X CHARPU)
ESC Racerstar MS Series 35A ESC BLHeLi_S
Motory Racerstar Racing Edition 2205S BR2205S 2300KV
Vrtule Kingkong 5x4.5x3 5045 5 Inch 3-Blade Propeller
FC Betaflight F3 AIO V1.1 Flight Controller with Integrated OSD Barometer Support SD Card (Klon Omnibus F3)@Betaflight 3.0.1
RX FrSky D4R-II 2.4G 4CH ACCST Telemetry Receiver Naked
Kamera Foxeer XAT600M HS1177 600TVL CCD 2.8MM
Ram je pomerne maly, preto som musel pri stavbe vynechal vsetky konektory, privody su skratene na minimum a pripajkovane napevno. FC Omnibus ma zabudovane OSD ktore je priamo podporovane Betaflightom. Velkou vyhodou je moznost konfigurovat vsetky dolezite parametre koptery cez okuliare, bez nutnosti pripajat mobil alebo notebook. Drobna nevyhoda tohoto FC je zabudovany 5v LBEC ktory sa neda vyradit ked je zapojene VBAT na meranie napatia akumulatora. Vyriesil som to tak ze som 78M05 stabilizator pre istotu odpajkoval a FC s prijmacom je napajane z PDB Matec. Motory boli za bezkonkurencnu cenu, ich kvalita je napriek pozitivnym recenziam pochybna. Rotor ma axialnu volu a jeden z motorov ma chytene loziska. Kazdopadne za cenu celeho motoru je u nas problem zohnat len samotne loziska takze ich problemy budem riesit kupou nahradnych motorov. Vrtule Kinkong niesu dobre vyvazene, list na ktorom je potlac je tazsi, cize odflaknuta forma. Kazdy jeden mal tento isty problem. Ja som zvyknuty vyvazovat vrtule brusenim co v tomto pripade nebolo mozne pretoze plast na nich je az neskutocne pruzny a odolny, tzn som ich vyvazil lepiacou paskou, co sa mi sice moc nelubi, ale jedna sa len o spotrebny material.
Vaha koptery bez akumulatora je 344g. Zatial som lietal len s 3s 2200mAh akumulatorom. Neskor planujem pouzivat 4s okolo 1300mAh a predpokladana vysledna vaha bude okolo 500-550g.
ESC Racerstar MS Series 35A ESC BLHeLi_S
Motory Racerstar Racing Edition 2205S BR2205S 2300KV
Vrtule Kingkong 5x4.5x3 5045 5 Inch 3-Blade Propeller
FC Betaflight F3 AIO V1.1 Flight Controller with Integrated OSD Barometer Support SD Card (Klon Omnibus F3)@Betaflight 3.0.1
RX FrSky D4R-II 2.4G 4CH ACCST Telemetry Receiver Naked
Kamera Foxeer XAT600M HS1177 600TVL CCD 2.8MM
Ram je pomerne maly, preto som musel pri stavbe vynechal vsetky konektory, privody su skratene na minimum a pripajkovane napevno. FC Omnibus ma zabudovane OSD ktore je priamo podporovane Betaflightom. Velkou vyhodou je moznost konfigurovat vsetky dolezite parametre koptery cez okuliare, bez nutnosti pripajat mobil alebo notebook. Drobna nevyhoda tohoto FC je zabudovany 5v LBEC ktory sa neda vyradit ked je zapojene VBAT na meranie napatia akumulatora. Vyriesil som to tak ze som 78M05 stabilizator pre istotu odpajkoval a FC s prijmacom je napajane z PDB Matec. Motory boli za bezkonkurencnu cenu, ich kvalita je napriek pozitivnym recenziam pochybna. Rotor ma axialnu volu a jeden z motorov ma chytene loziska. Kazdopadne za cenu celeho motoru je u nas problem zohnat len samotne loziska takze ich problemy budem riesit kupou nahradnych motorov. Vrtule Kinkong niesu dobre vyvazene, list na ktorom je potlac je tazsi, cize odflaknuta forma. Kazdy jeden mal tento isty problem. Ja som zvyknuty vyvazovat vrtule brusenim co v tomto pripade nebolo mozne pretoze plast na nich je az neskutocne pruzny a odolny, tzn som ich vyvazil lepiacou paskou, co sa mi sice moc nelubi, ale jedna sa len o spotrebny material.
Vaha koptery bez akumulatora je 344g. Zatial som lietal len s 3s 2200mAh akumulatorom. Neskor planujem pouzivat 4s okolo 1300mAh a predpokladana vysledna vaha bude okolo 500-550g.
ID Modelu: AM7664 | Zobrazenia: 2701 | Pridané: 18. 12. 2016 o 15:57 | Autor: JiriF





| Autor | Správa |
|
poison modelár 
Príspevkov: 3389 Moje modely Poslať správu |
Pekna praca. |
|
JiriF modelár 
Príspevkov: 184 Moje modely Poslať správu |
Dakujem, hadam sa raz stretneme a polietame  |
|
poison modelár
Príspevkov: 3389 Moje modely Poslať správu |
Urcite ano. |

- Pridať komentár